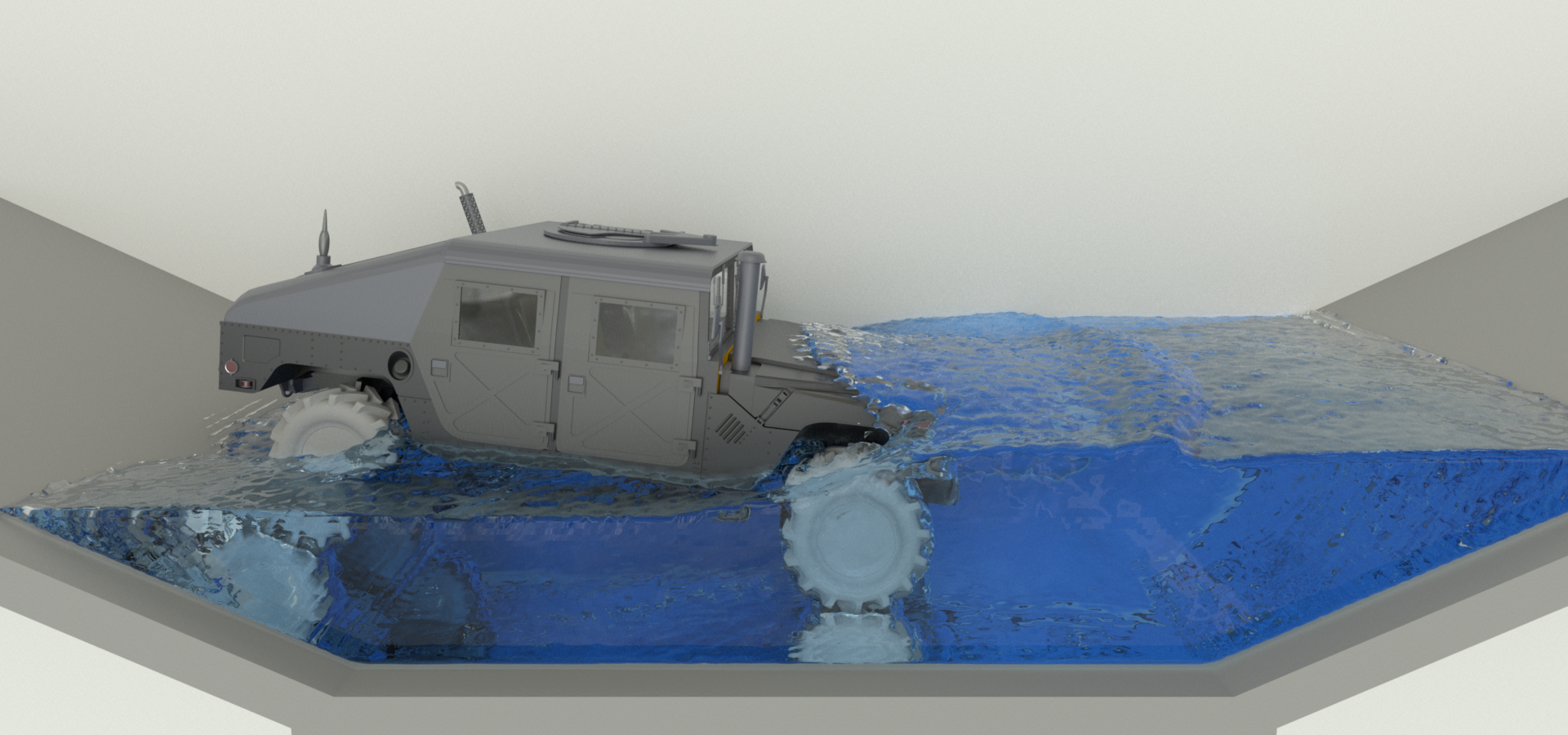
Vehicle Fording

Collapse of Two Vaults
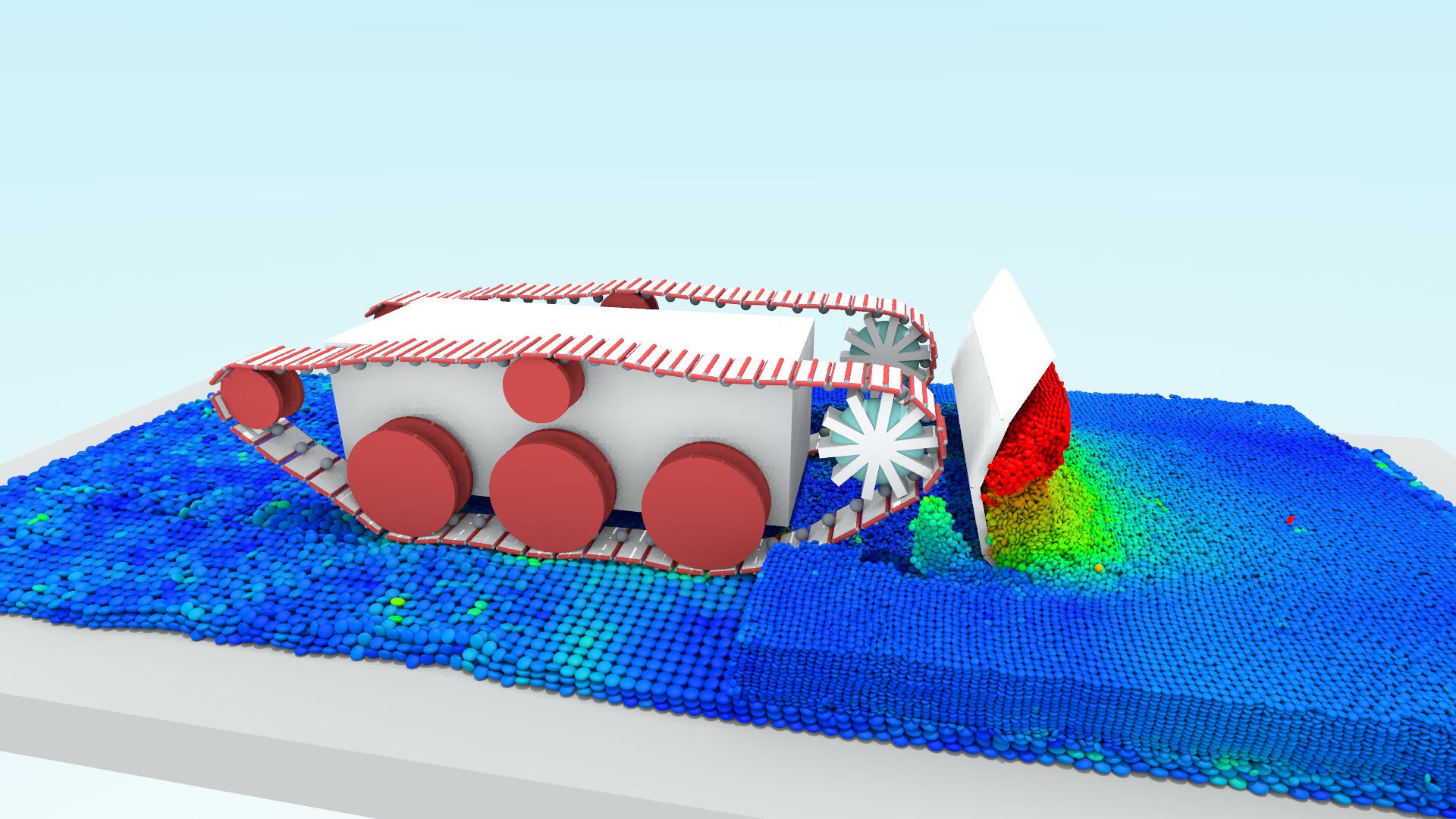
Tracked Vehicle

Vehicle Negotating Ditch
Extrusion, Composite Material
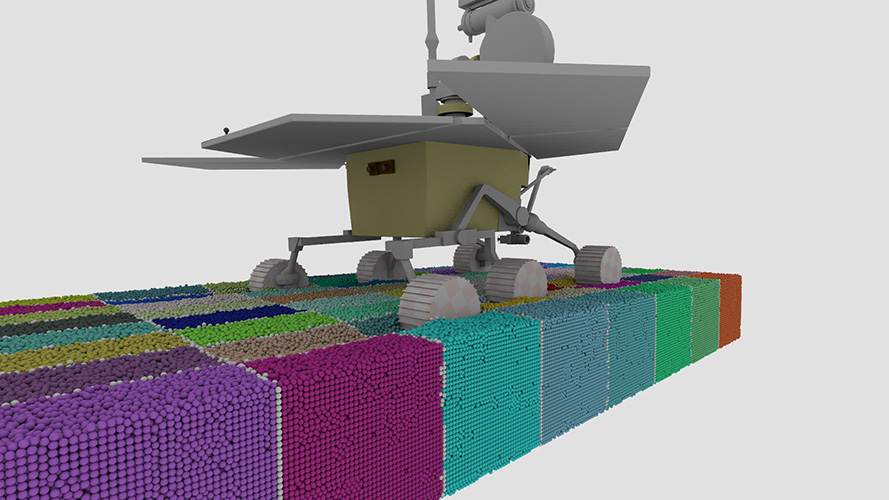
Rover 2 Million Bodies

Mechanical Clock
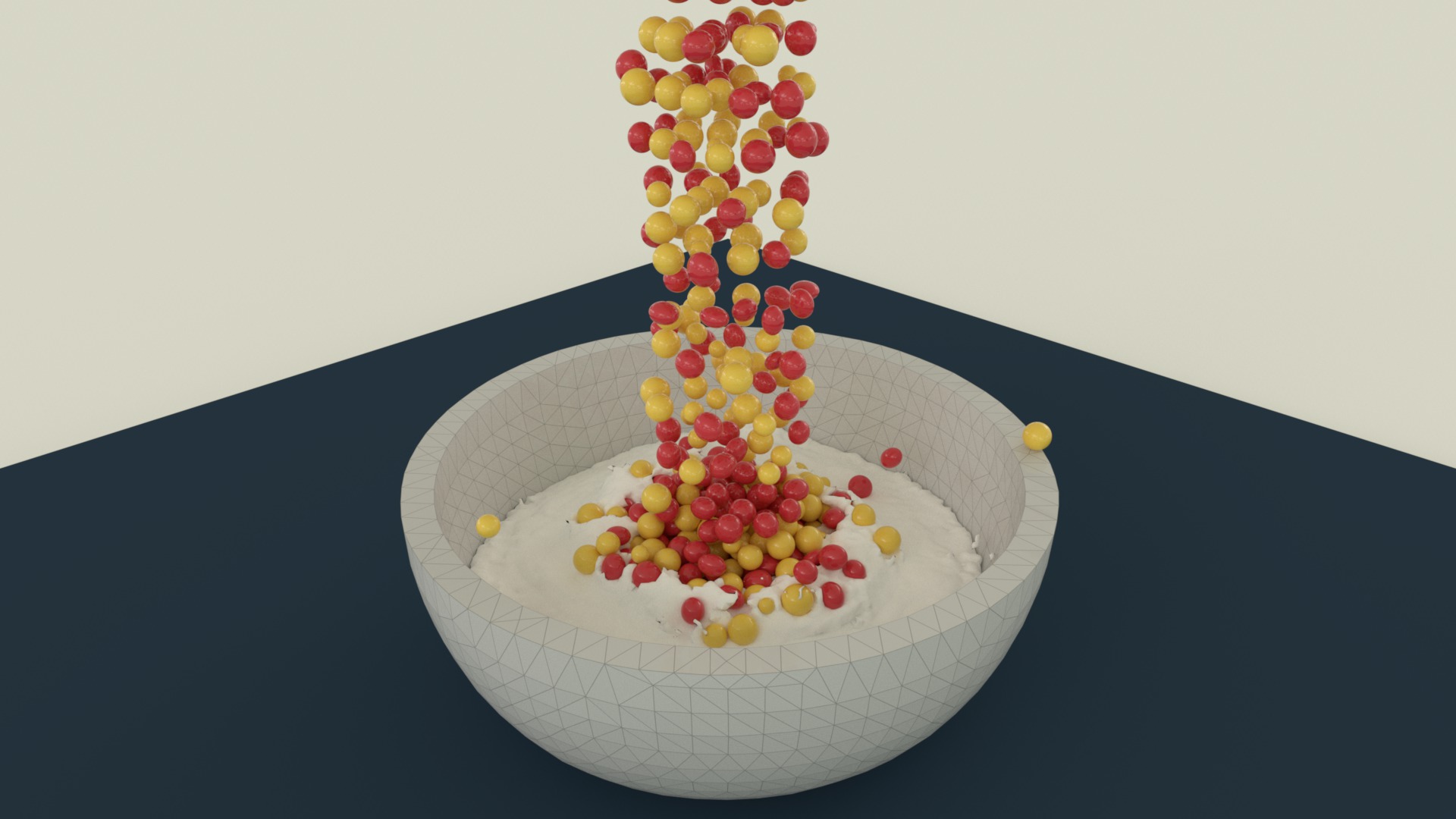
Flexible Bowl Filled With Milk And Cereal
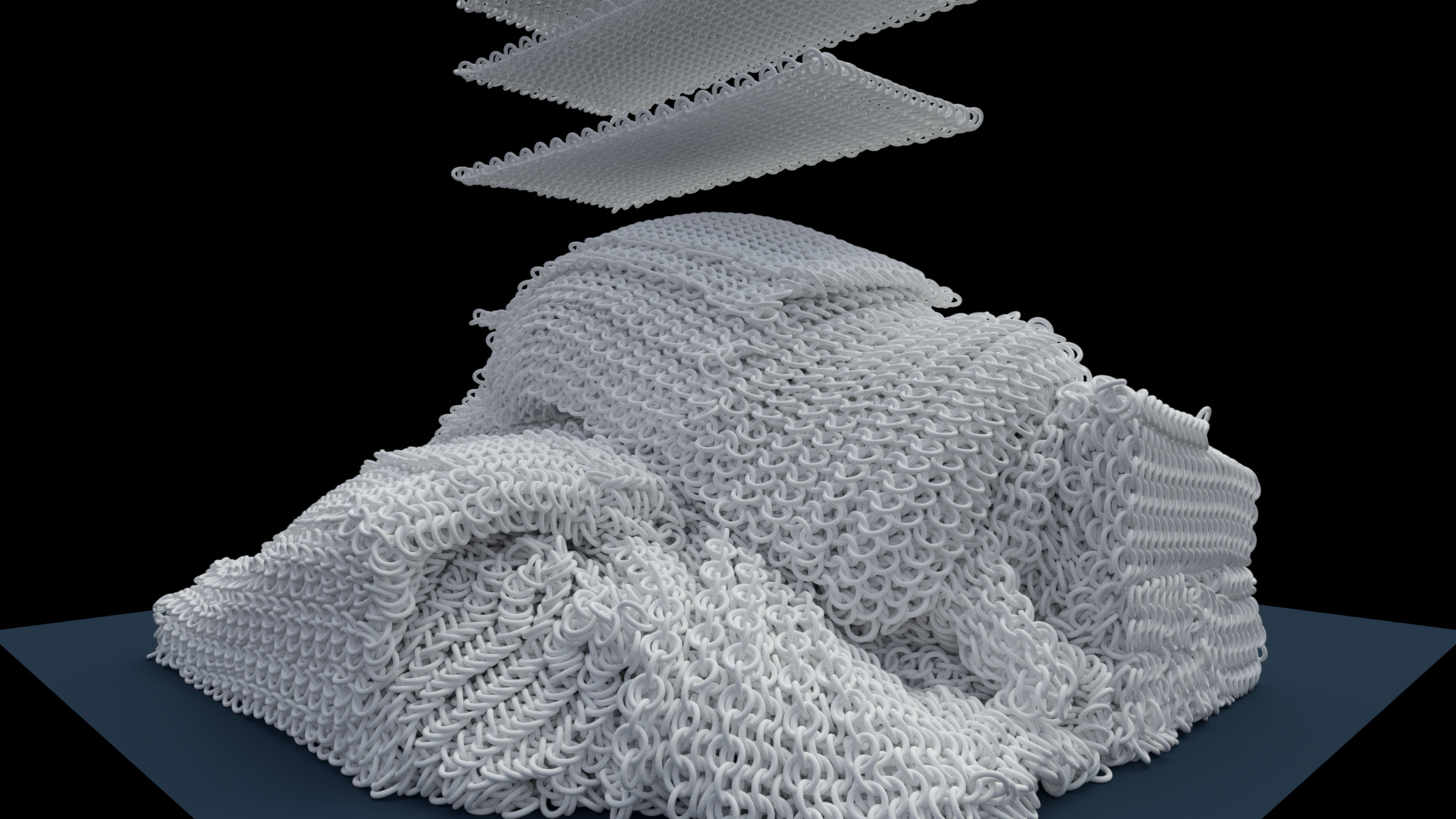
Chain-mail Sheets, 3D Printing Related
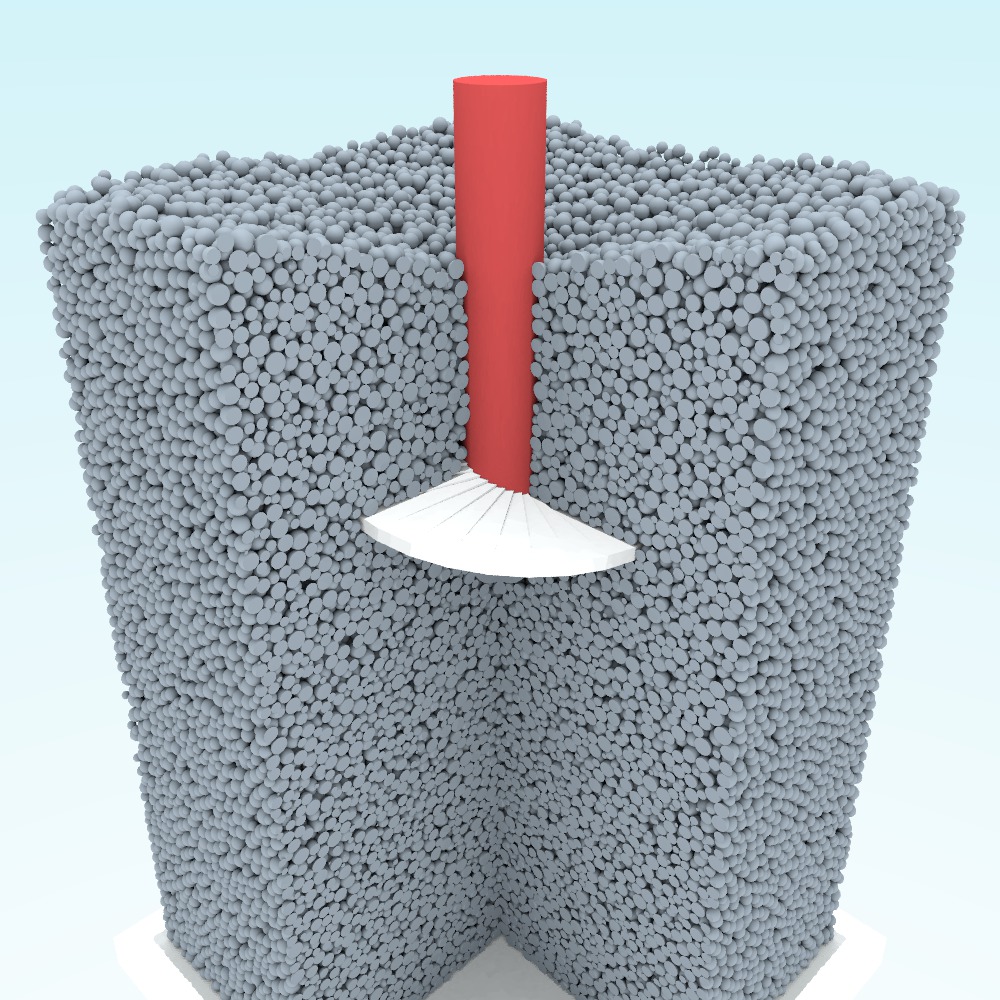
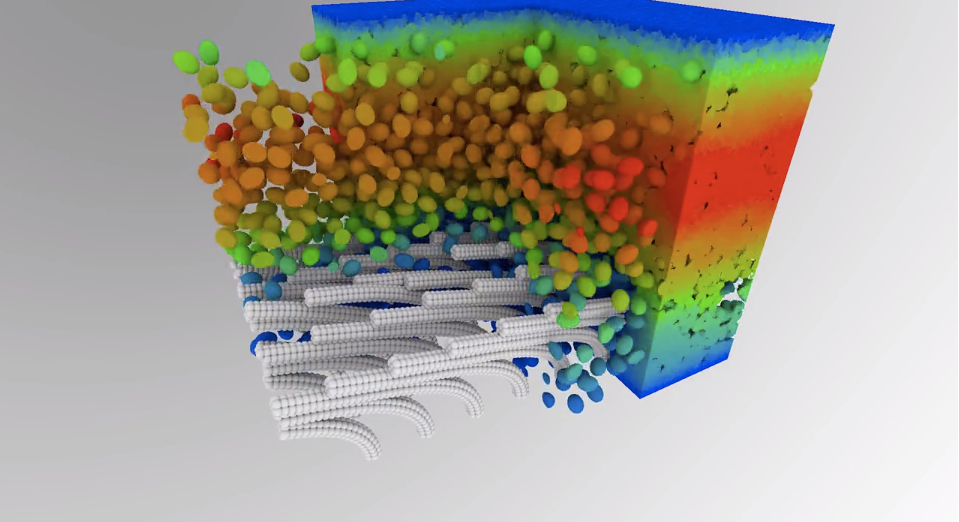
Anchoring in Poly-Disperse Granular Material
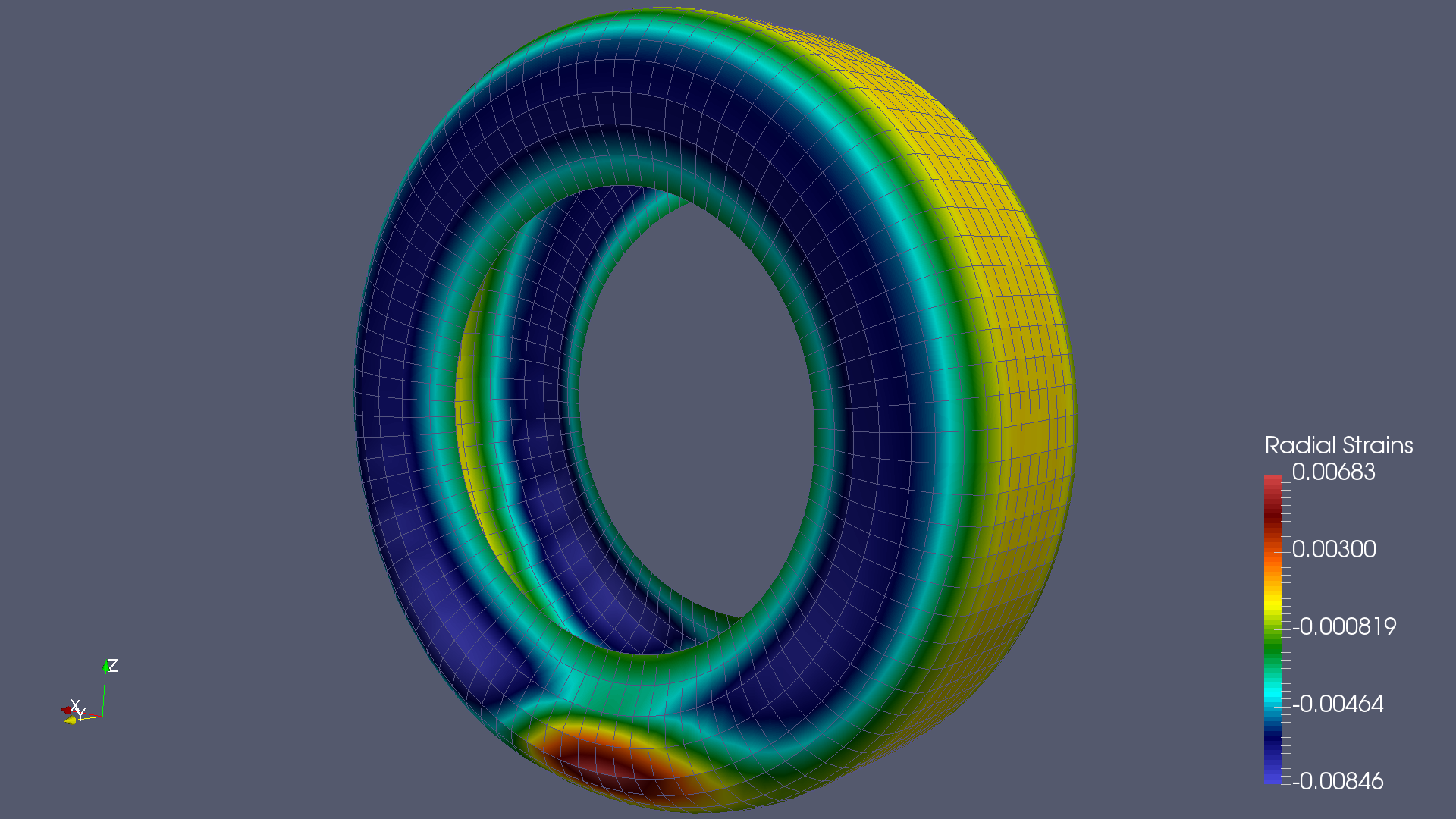
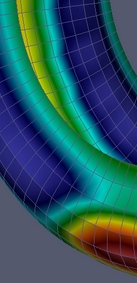
Radial Strain Distribution in ANCF HMMWV Tire
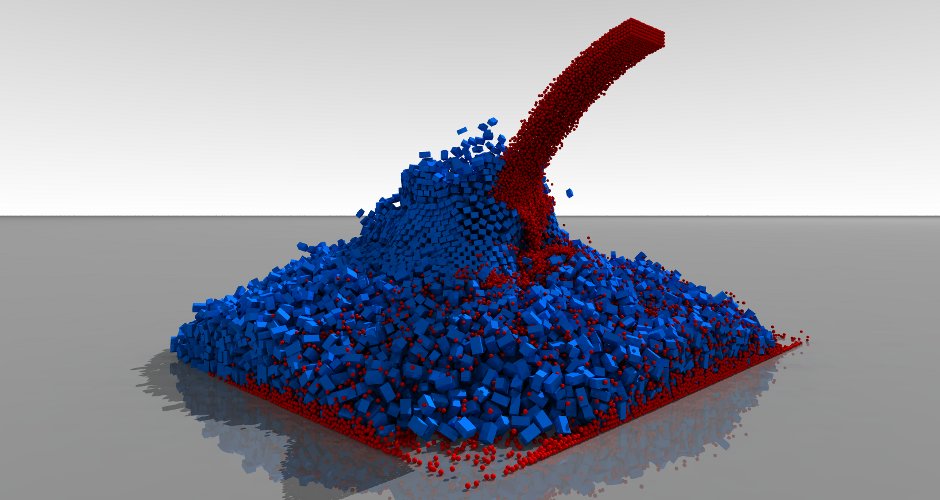
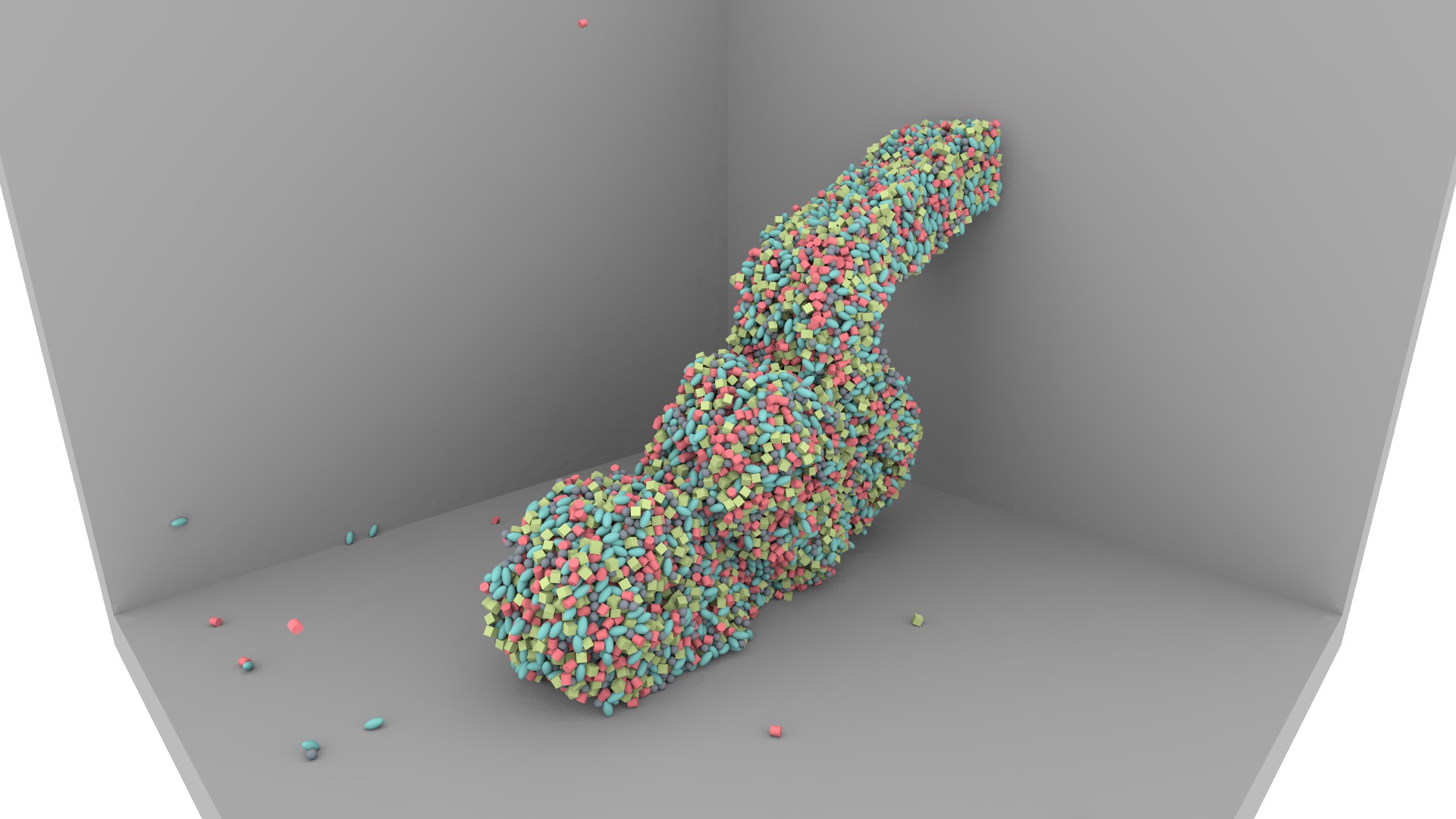
Sphere-Hexahedron Mixing Problem
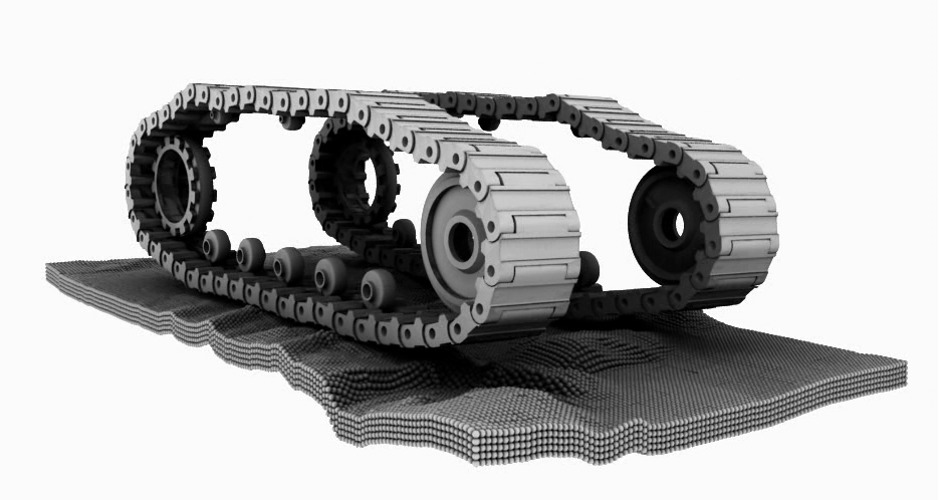
Double Track
Block Tower
Fluid-Solid Interaction
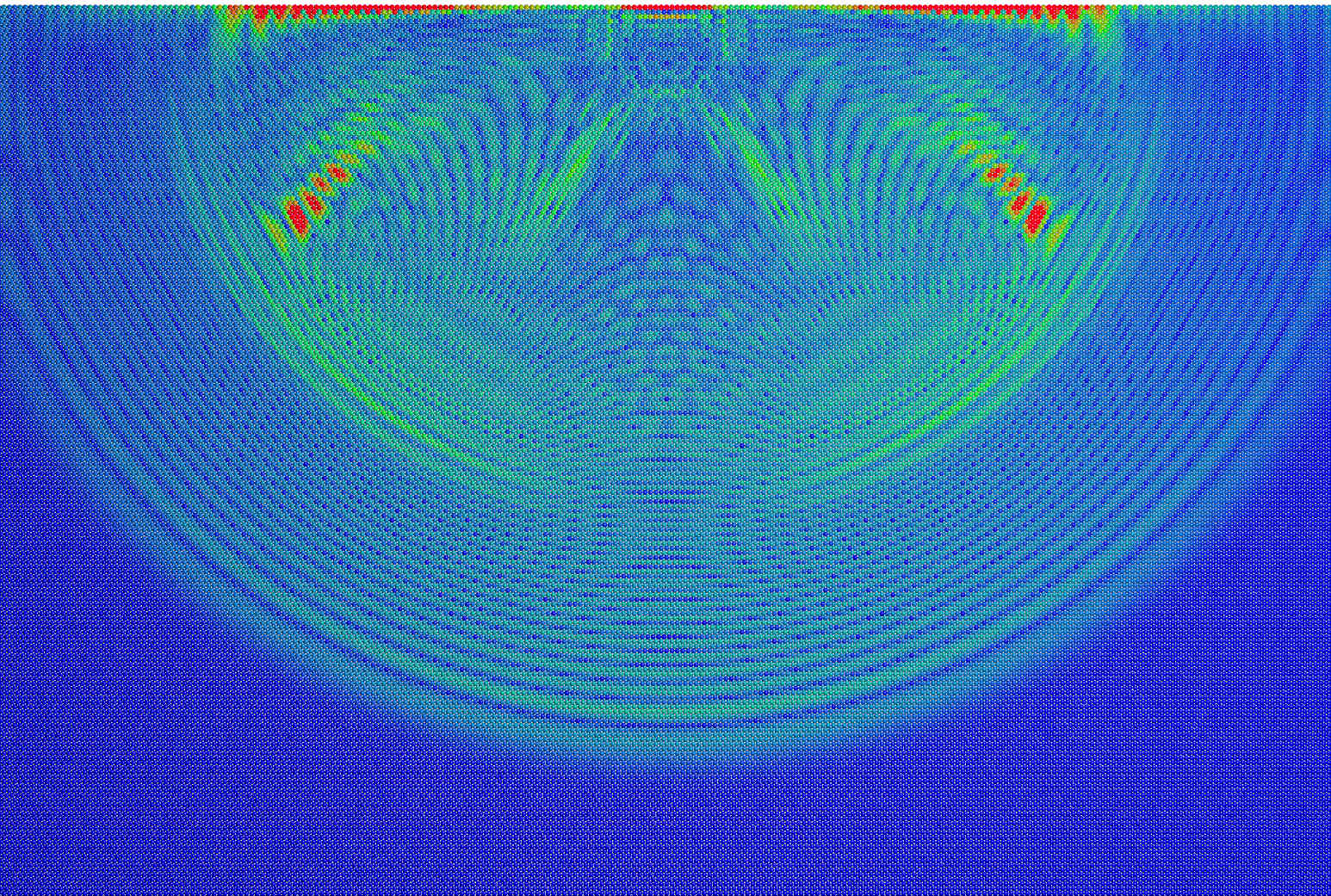
Shock-Wave Propagation in Granular Material
Simulated Using CHRONO: